0cm 0pt">
Boa Idéia
Controle Robôs com .Net
Aprenda como controlar robôs simulados com Visual Studio
Neste artigo veremos
· Conhecer o Robotics Studio;
· Introduçăo ao VPL;
· Como integrar o Robotics Studio com o Visual Studio;
· Aplicaçăo prática: Controlar um robô com aplicaçăo criada com o Visual Studio, movimentando-o e utilizando o sensor de colisăo.
Qual a finalidade
· Criar um software que controla o robô simulado pelo Microsoft Robotic Studio através de controles programados com o Visual Studio.
Quais situaçőes utilizam esses recursos?
· Construir um robô pode ser caro. Utilizando ferramentas de simulaçăo, podemos diminuir drasticamente os custos de montagem e agilizar o processo de desenvolvimento.
Resumo do DevMan
Neste artigo veremos como utilizar simulaçőes de robô, através do Microsoft Robotic Studio e conheceremos alguns conceitos de VPL. Na parte prática integraremos a simulaçăo com o Visual Studio, utilizando comandos programados para controlar o motor e interagir com o sensor de colisăo.
A robótica é um campo que com certeza está crescendo muito em todo o mundo e estimula a humanidade desde o início da era moderna. Robôs que efetuam desde simples e repetidas tarefas, como soldar carros, até aqueles que auxiliam no desarmamento de bombas e ajudam em operaçőes cirúrgicas já fazem parte da nossa realidade. Robôs que apóiam a limpeza doméstica como aspiradores robotizados que calculam a área de limpeza através de sensores, evitam degraus e otimizam o percurso de forma que o chăo fique 100% limpo no menor tempo possível, já podem ser adquiridos nos Estados Unidos pela bagatela de US$ 500,00. Existem até robôs que retornam ŕ base quando a carga da bateria está acabando, e retoma do ponto onde parou a limpeza quando a recarga foi feita. Certamente o campo da robótica ainda tem muito a crescer, e está cada vez mais surgindo ferramentas que apóiam o desenvolvimento.
Criar um robô pode ser uma atividade cara por causa das peças, que na maioria das vezes săo difíceis de ser adquiridas, pelo custo de montagem e reparos durante o projeto. Quanto menores forem estes custos, melhor. Pensando nisso foi desenvolvido um simulador que ajuda a criar um robô com o menor custo possível, pois minimiza todos os custos levantados anteriormente. Imaginando ainda uma equipe de trabalho, em que cada desenvolvedor cuida de uma parte do projeto, seriam necessários vários robôs semelhantes, além de realizar um agendamento de teste, para que cada desenvolvedor pudesse testar o seu código junto ao hardware.
Fazer o debug com um robô físico também năo é uma tarefa fácil, pois diferenciar problemas de hardware e software pode ser uma tarefa árdua e cara. Com a simulaçăo, é possível debugar o software, sabendo que năo há problema de hardware, e com a facilidade de colocar breakpoints, pontos de paradas de código que facilitam o debug do sistema. Na simulaçăo é possível até representar imperfeiçőes no chăo, como por exemplo terrenos arenosos ou obstáculos.
Um simulador pode ser instalado facilmente em qualquer máquina que atenda as configuraçőes mínimas e é muito simples de aprender. Adicionar novas funcionalidades ao robô também é uma atividade relativamente simples no ambiente simulado e bem mais barato do que criar um robô de verdade. Caso seja necessário fazer adaptaçőes de projetos, as peças săo virtuais, năo sendo necessário encomendá-las ou fabricá-las. O cenário pode ser adaptado para as mais diversas necessidades, inclusive fazer alteraçőes na força gravitacional, simulando operaçőes em outros planetas.
O simulador é um serviço e pode rodar assincronamente em relaçăo a outros serviços. Pode também interagir com outros serviços, dando uma flexibilidade imensa. Ele mantém o seu próprio estado de objetos do mundo como um todo, podendo também, ler o teclado, o mouse, joysticks e outros periféricos de entrada de dados.
A Microsoft disponibiliza gratuitamente para download o Robotics Studio, uma ferramenta de simulaçăo de robôs. Sua renderizaçăo 3D utiliza o XNA (framework para desenvolvimento de jogos), que internamente utiliza o DirectX. Utiliza simulaçăo física para ser o mais real possível, com base no software AGEIA simulando, por exemplo, relevos e colisőes com resultados bem próximos aos do mundo real. É possível editar e modelar cenários em tempo de execuçăo aproximando ainda mais a simulaçăo ŕ realidade.
A arquitetura da simulaçăo possui em linhas gerais duas entidades, a primeira é responsável pela parte visual, ou seja, como o objeto é representado visualmente. A segunda é um conjunto de representaçőes físicas, ou seja, como o objeto se relaciona com os outros fisicamente, em caso de uma colisăo, por exemplo.
Nota do DevMan
Além de softwares que fazem simulaçőes físicas, existem placas, como por exemplo, a PhysX que ficam responsáveis pelo processamento físico, tirando do processador esta árdua tarefa.
Assim como existem placas especializadas em processamento gráfico, estas placas săo especializadas em processamento físico. Ambiente de simulaçăo pode se beneficiar muito deste hardware, que começou a ser fabricado a partir de 2006.
Jogos com muito processamento físico também podem se beneficiar deste tipo de hardware, dando ao jogador uma experięncia cada vez mais real. A PhysX é compatível com Sony Playstation 3, Microsoft Xbox 360, Nintendo Wii e PC, e é um pré-requisito em muitos jogos de última geraçăo.
As entidades săo representadas por elementos como: câmera, céu, componentes dos robôs (motor, sensor), prédios, móveis, formas geométricas, ou seja, qualquer coisa visível ou física. Podem ser conectadas para representar um mundo real e dar vida ŕ animaçăo, como mudar uma câmera ou alterar o horizonte.
Neste artigo vamos aprender como integrar o simulador de robôs com o Visual Studio, e criar comandos para movimentar o robô e trabalhar com o sensor de colisăo.
Instalando o MS Robotics Studio
Para começar a utilizar o MS Robotics Studio, vocę precisa fazer download na instalaçăo disponível no site abaixo, ou procure por download Robotics Studio:
http://msdn.microsoft.com/en-us/robotics/default.aspx
A versăo que utilizei para este artigo foi a versăo full 1.5 (completa 1.5). Existem duas versőes disponíveis atualmente; a full de 401.7 Mb e uma menor de 161.6 Mb. A instalaçăo é bem simples, basta prosseguir todas as etapas. A instalaçăo verificará alguns componentes, e provavelmente instalará o DirectX, o XNA Framework e outros softwares de apoio. Após a instalaçăo, será criado um menu no menu Iniciar do seu Windows.
Abra o seu menu iniciar ŕ Todos os Programas ŕ Microsoft Robotics Developer Studio 2008 ŕ Visual Simulation Environment ŕ iRobot Create Simulation (Figura 1). Uma tela de prompt abrirá com uma série de comandos (Figura 2). Aguarde todos os comandos serem executados e em seguida uma janela do simulador aparecerá (Figura 3), junto com uma tela de controle do robô (Figura 4).

Figura 1. Inicializando uma simulaçăo com o Robotics Studio
Figura 2. Tela de prompt de inicializaçăo do Simulador
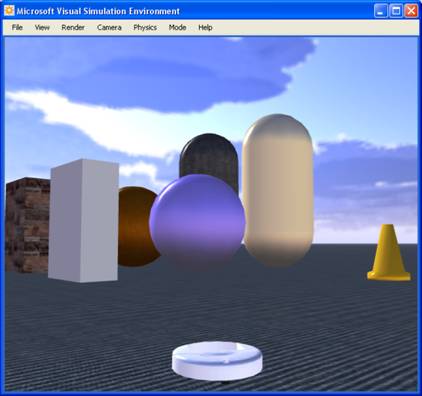
Figura 3. Simulaçăo do IRobot
...







