|
· Montagem de um motor a ser controlado pelo computador; · Como controlar um robô através da porta paralela; · Ativar comandos de voz que controlam o robô. |
|
Qual a finalidade |
|
· Integraçăo do hardware com comando de voz. |
|
Quais situaçőes utilizam esses recursos? |
|
· Aplicaçőes residenciais e industriais. |

Resumo do DevMan
Cada vez mais os robôs farăo parte de nossas vidas. Mecanismos de automaçăo săo uma realidade cada vez mais presente e neste artigo veremos como controlar um motor por comandos de voz.
No artigo anterior vimos como fazer uma simulaçăo de um robô, utilizando o Robotic Studio e integrando-o com uma aplicaçăo construída no Visual Studio. Aprendemos que simulaçőes de robôs permitem que uma equipe trabalhe em um mesmo projeto de forma ágil com uma incrível reduçăo de custo, pois nenhum grande investimento inicial é necessário.
Neste artigo vamos deixar um pouco o mundo da simulaçăo e faremos um "hello world" (olá mundo) de um robô *real*. Nosso robô será representado por um motor, e será controlado através de comandos de voz utilizando o Speech SDK. Será possível rotacionar o motor no sentido horário e anti-horário, além de controlar a velocidade e o ângulo de rotaçăo. Embora bem simples, este exemplo pode servir de base para um robô mais sofisticado, ou utilizado em uma automaçăo residencial ou industrial controlada por comandos de voz.
No site da .Net Magazine há disponível um vídeo que fiz com o motor em funcionamento, inclusive com os comando de voz. Se quiser, veja o vídeo antes de “sujarmos nossas măos” com o código.
Motor de Passo
Antes de construirmos o robô, vamos conhecer um pouco sobre motor de passo. Todos conhecemos o funcionamento de uma bússola, correto? É um metal, apoiado no centro permitindo uma mobilidade de 360 graus. Como a terra possui campos magnéticos a bússola aponta sempre para o pólo magnético, permitindo assim uma orientaçăo geográfica. Imagine se tivéssemos a capacidade de girar este pólo magnético. Certamente o ferro da bússola iria girar, conforme o pólo fosse girando. Se vocę quiser fazer uma experięncia, aproxime um imă perto da bússola. Ela se orientará de acordo com a posiçăo do imă, pois sua força magnética passa a ser mais intensa sobre a bússola do que a força imposta pelo campo magnético terrestre. Se girarmos o imă ao redor da bússola, fazendo uma volta completa, o ferro central da bússola também girará, acompanhando o imă. Este é o mesmo princípio de funcionamento do motor de passo. Em termos gerais, existem imăs dentro do motor de passos que podem ser ativados ou desativados. Quando ativados e desativados em seqüęncia, ele permite que o eixo rotacione, girando assim o motor. Este funcionamento será explorado neste artigo.
Porta paralela
Vamos entender também a porta paralela do computador. Até pouco tempo atrás, esta porta era muito utilizada para as impressoras. Hoje já está sendo substituída pela USB. Porém, para fins didáticos vamos utilizar a porta paralela por permitir utilizar software e hardware bem mais simples do que se utilizássemos a porta serial. A porta paralela em linhas gerais possui oito bits de dados. Para controlar o nosso motor vamos utilizar apenas quatro bits, vide portas A ŕ D da Figura 1. Se vocę quiser controlar dois motores simultaneamente seria preciso apenas duplicar parte do circuito e ligá-lo nos outros quatro bits imediatamente ŕ esquerda da porta D. Tome muito cuidado ao conectar os fios na porta paralela, pois esta está ligada diretamente ŕ placa măe, e poderá danificá-la numa eventual conexăo errada. O terra do circuito deve ser ligado ao terra da porta paralela, isto permite que todo o circuito tenha a mesma referęncia.
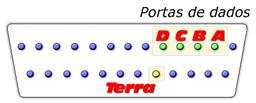
Figura 1. Porta paralela, saídas utilizadas no projeto
Nota do DevMan
Para controlar o motor por uma porta serial, é necessário ter um conversor serial-paralelo. O sinal serial é assim chamado por transmitir as informaçőes (bits) em seqüęncia, um de cada vez. A porta serial RS 232 foi muito utilizada para mouse, modems e algumas impressoras. O sinal paralelo permite enviar uma seqüęncia de palavras por vez, enquanto o serial envia somente um bit. A comunicaçăo serial pode ser síncrona, quando o transmissor e o receptor possuem um sincronismo na troca de dados. Ou pode ser assíncrona, quando eles năo possuem sincronismo.
Neste caso é normal utilizar um bit de marcaçăo de início de conversa (start bit), e outro de término (stop bit). Quanto mais complexo o protocolo, mais informaçőes auxiliares săo enviadas, de forma a garantir que a comunicaçăo foi enviada e recebida com sucesso. Um exemplo de informaçăo adicional é o bit de paridade. Neste caso um cálculo é feito pelo emissor, e conferido pelo receptor. Caso o resultado seja o mesmo, a comunicaçăo foi efetuada com sucesso.
Montando o circuito
Para montar o circuito da Figura 2, projetei o modelo mais simples que consegui para que possamos focar no software. Na internet é possível encontrar diversas variaçőes deste circuito, alguns com recursos mais sofisticados, outros bem similares. Para comprar os componentes fui ao centro de Săo Paulo, gastei aproximadamente R$ 40,00, pois já tinha uma fonte DC. Todos os componentes utilizados săo relativamente fáceis de encontrar em lojas eletrônicas especializadas. Procure uma na sua cidade, ou outra opçăo é encomendar através de lojas virtuais especializadas.

